



お知らせ
学長賞・各学会賞をそれぞれ受賞いたしました。
電気学会電子・情報・システム部門研究会優秀論文発表賞
2021/02 伊東 航平君(制御システム研究室M1,主指導:弓場井 一裕 教授)電気学会産業応用部門優秀論文発表賞
2020/09 牧村 愛萌君(電機システム研究室,主指導:小山 昌人 助教)SAMCON2020 Outstanding Paper Award
2020/05 中村 俊哉君(制御システム研究室,主指導:矢代 大祐 助教)IEEE名古屋支部優秀学生賞
2020/03 中村 俊哉君(制御システム研究室,主指導:矢代 大祐 助教)学長賞
2020/03 稲垣 颯太君(制御システム研究室B4,主指導:弓場井 一裕 准教授)2020/03 石川 駿貴君(エネルギーシステム研究室B4,主指導:山村 直紀 准教授)
計測自動制御学会中部支部 学業優秀賞
2020/03 伊東 航平君(制御システム研究室B4,主指導:弓場井 一裕 准教授)電気学会東海支部 電気学術奨励賞
2020/03 犬飼 将也君(制御システム研究室B4,主指導:矢代 大祐 助教)INFORMATION
人間・ロボット分野

超高齢社会の問題解決に資することを目的に,下肢の運動機能に関する技術開発を行っています.人間環境で動作可能なロボットを実現するために,安全性を確保しつつ,性能を高める手法を研究しています.
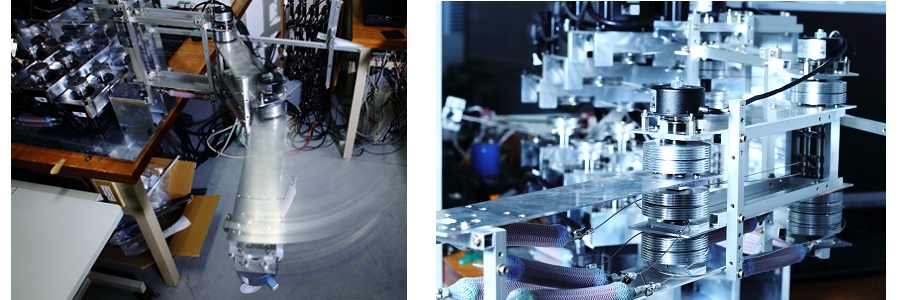
モーションコントロール分野
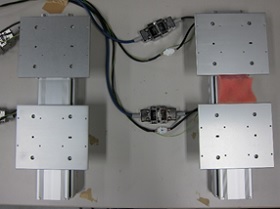
産業応用を意識したモーションコントロール(動きの制御)の研究開発をしています. 例えば,ワークに対して任意の位置・姿勢・接触力で高速・高精度に工具をアプローチできる機械加工装置に関心があります.
制御理論分野
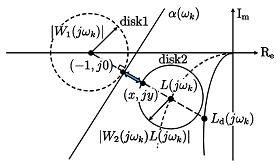
ロボット・モータ・エネルギのどの分野においても高い性能を示す制御系を構築することが重要な課題になります.本分野では高性能な制御器を設計する手法について理論的な研究を進めており,特に制御対象の入出力データや周波数応答から直接制御器を設計するデータ駆動型制御器設計法の研究に取り組んでいます.また,理論的な研究に留まらず,実機を用いた検証も行っています.
モータ制御分野
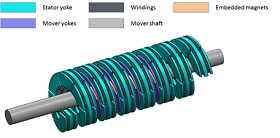
電気モータをより便利なものとするために,新たなモータ(図:小型高推力直動モータ)の開発やモータ制御/駆動回路を主軸に研究しています.また,ロボットや発電機など応用例に関する研究にも取り組んでいます.
エネルギ分野

風力・太陽光などの再生可能エネルギーを,高効率に電力に変換する変換器や発電電力を安定に電力系統に連系する変換器を開発しています。また,配電系統の効率的な運用方式についての研究も行っています。